
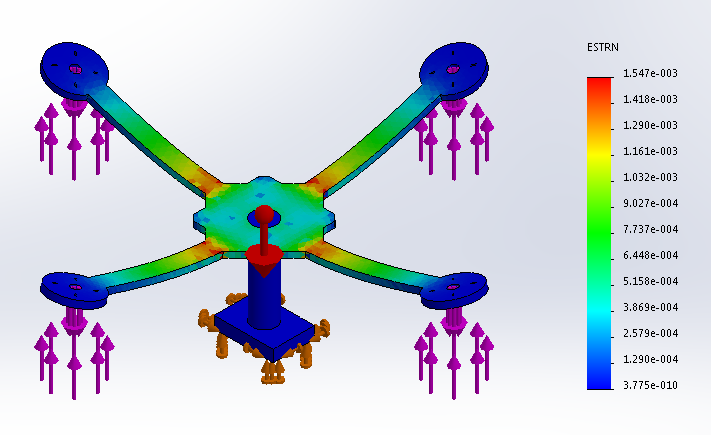
Resumen
Los multirotores existentes son energizados por baterías, generalmente Li-Po (Litio-Polímero), con una autonomía que no superan los 25 minutos. Este tiempo restringe las aplicaciones a capturar imágenes, hacer inspecciones aéreas o simplemente levantar objetos.
Es por eso que se propone adaptar una fuente alternativa a las baterías, que sea capaz de incrementar el tiempo de vuelo en los multirotores, sin modificar la electrónica de control en estos, que sea fácilmente reemplazable por las baterías de multirotores comerciales y que permita explorar aplicaciones hasta ahora limitadas o prohibitivas para estos.
Se reemplazará la batería por un micro-motor en combinación con un generador y un supercondensador (o en su defecto una pequeña batería), que sea capaz de entregar la energía continua y pulsativa que requieren los motores eléctricos sin escobillas que actualmente propulsan las hélices de un multirotor comercial, Se pretende así mantener la configuración electrónica típica; i.e., controlador, ESC (Electronic Speed Controllers), receptor-transmisor, etc.; cuya disponibilidad en distintos formatos y tamaños combinables permite la masificación de multirotores en la actualidad. Se pretende comparar la autonomía de la combinación motor+generador+condensador con una batería LiPo de un peso.
Se espera disponer de un dispositivo que extienda la autonomía de multirotores de última generación al menos al doble del tiempo de vuelo promedio; sin necesidad de realizar grandes modificaciones en el hardware. Se espera, además, posibilitar aplicaciones hasta ahora prohibitivas para multirotores, como es el levantamiento de información a través de zonas geográficamente extensas.
Profesores a cargo: Ricardo Mendoza - Ricardo Fuentes
Participantes: Mary Torrico, Héctor Tapia, Oscar Leiva y Michael Terrazas